深度学习模型之CNN(十三)MobileNetv1v2v3网络详解
MobileNet详解
在传统的卷积神经网络中,内存需求大、运算量大,导致无法在移动设备以及嵌入式设备上运行。在之前学习的网络结构中,例如VGG16的权重大小有400+M、ResNet的152层模型权重大小能到达600+M。如此大的模型参数是不可能在移动设备以及嵌入式设备上运行的。
MobileNet网络是由由google团队在2017年提出的,专注于移动端或者嵌入式设备中的轻量级CNN网络。相比传统卷积神经网络,在准确率小幅降低的前提下大大减少模型参数与运算量。(相比VGG16准确率减少了0.9%,但模型参数只有VGG的1/32)。
MobileNet v1
MobileNetv1版本原论文:MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
论文网络中的亮点:
- Depthwise Convolution(简称DW卷积,大大减少运算量和参数数量)
- 增加超参数$\alpha$、$\beta$(人为设定,$\alpha$控制卷积层卷积核的个数、$\beta$控制输入图像大小)
DW卷积
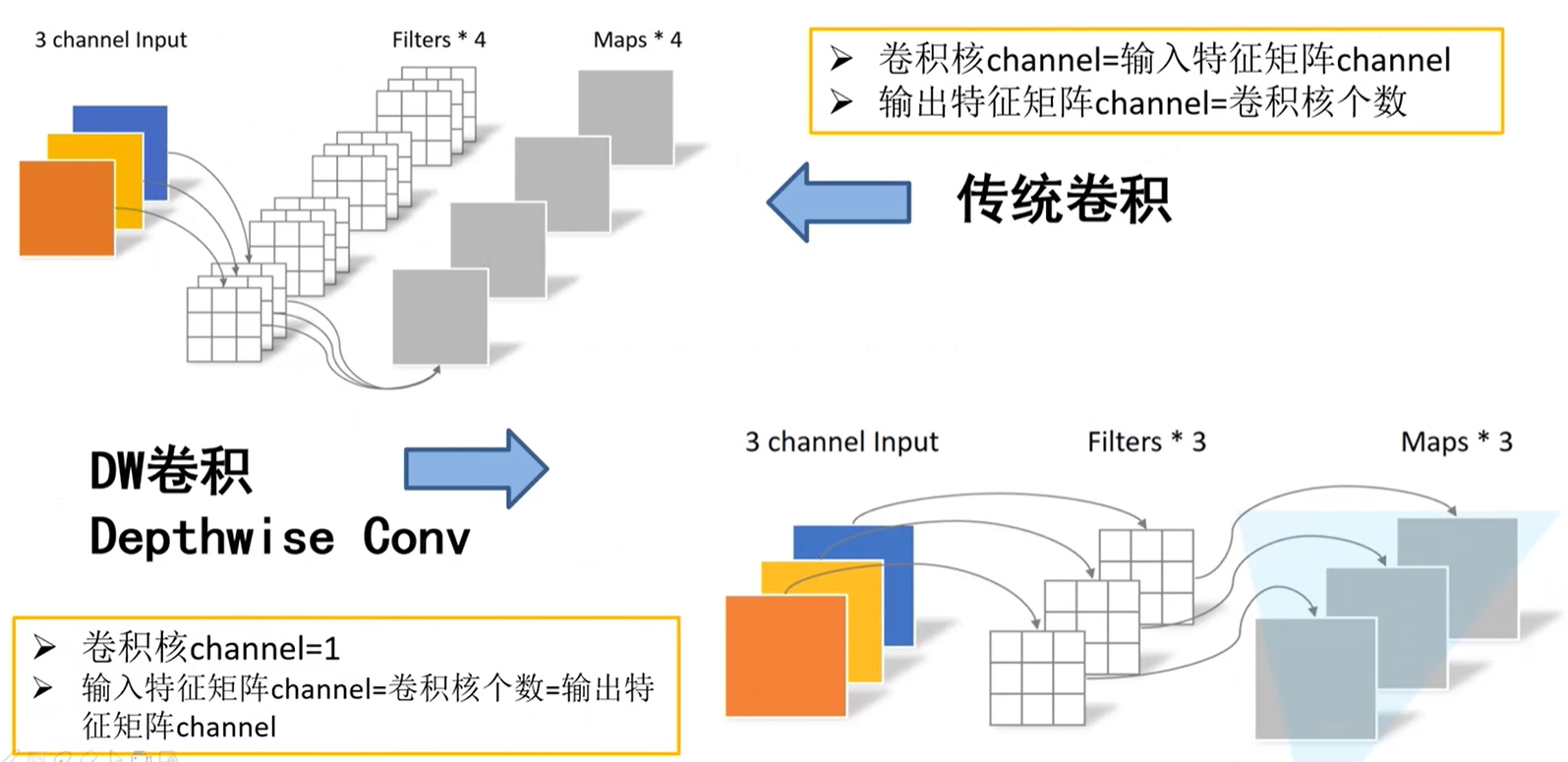
传统卷积过程
输入一个深度为3的特征矩阵,经过4个卷积核进行卷积,每个卷积核的深度与输入特征矩阵的深度是相同的,所以每个卷积核深度也为3。又因输出特征矩阵的深度是由卷积核的个数决定的,因此最终输出特征矩阵的深度为4。
总结:
- 卷积核channel = 输入特征矩阵channel
- 输出特征矩阵channel = 卷积核个数
DW卷积过程
输入一个深度为3的特征矩阵,经过3个卷积核进行卷积,且卷积核深度为1,也就是说一个卷积核对应输入特征矩阵的一个channel,再得到相应的输出特征矩阵的一个channel。既然一个卷积核负责输入特征矩阵的一个深度,那么卷积核的个数应该和输入特征矩阵的深度相同。又因为每一个卷积核与输入特征矩阵的一个channel进行卷积之后得到一个输出特征矩阵的channel,那么输出特征矩阵的深度与卷积核的个数相同,也和输入特征矩阵的深度相同。
总结:
- 卷积核channel = 1
- 输入特征矩阵channel = 卷积核个数 = 输出特征矩阵channel
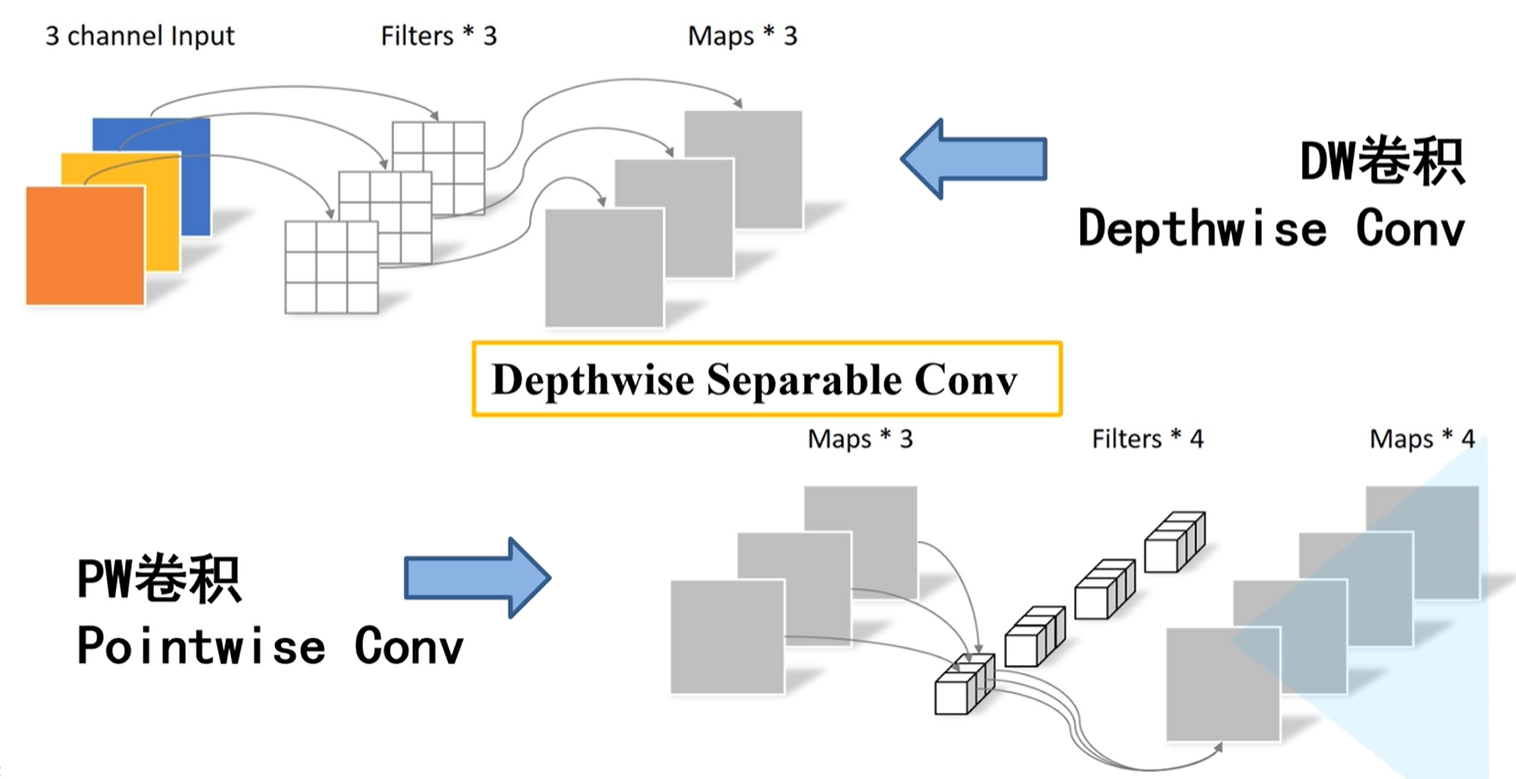
Depthwise Separable Conv
也叫做深度可分的卷积操作,由两部分组成,第一部分由DW卷积,第二部分为PW卷积。PW卷积实际上相当于普通卷积,只不过卷积核的大小为1。由下图所示,卷积层中卷积核的深度 = 1。
通常情况下DW卷积和PW卷积是一起使用的。
DW&PW卷积和普通卷积的区别
下图(上左)为普通卷积操作,下图(下左)为DW卷积操作,下图(下右)为PW卷积操作,二者结合为深度可分卷积操作。
在普通卷积中,通过卷积操作之后,得到的是channel = 4的特征矩阵;在DW&PW卷积操作之后,得到的同样是channel = 4的特征矩阵。
参数代表含义:$D_F$:输入特征矩阵的宽高;$D_K$:卷积核的大小;M:输入特征矩阵的深度;N:输出特征矩阵的深度
普通卷积计算量:卷积核的高x卷积核的宽x输入特征矩阵的深度x输出特征矩阵的深度x输入特征矩阵的高x输入特征矩阵的宽(默认stride = 1)
DW&PW卷积计算量:
- DW:卷积核的大小x输入特征矩阵的深度x输入特征矩阵的高宽
- PW(相当于普通的卷积):卷积核的高和宽(都是1)x输入特征矩阵的深度x输出特征矩阵的深度x输入特征矩阵的高宽(默认stride = 1)
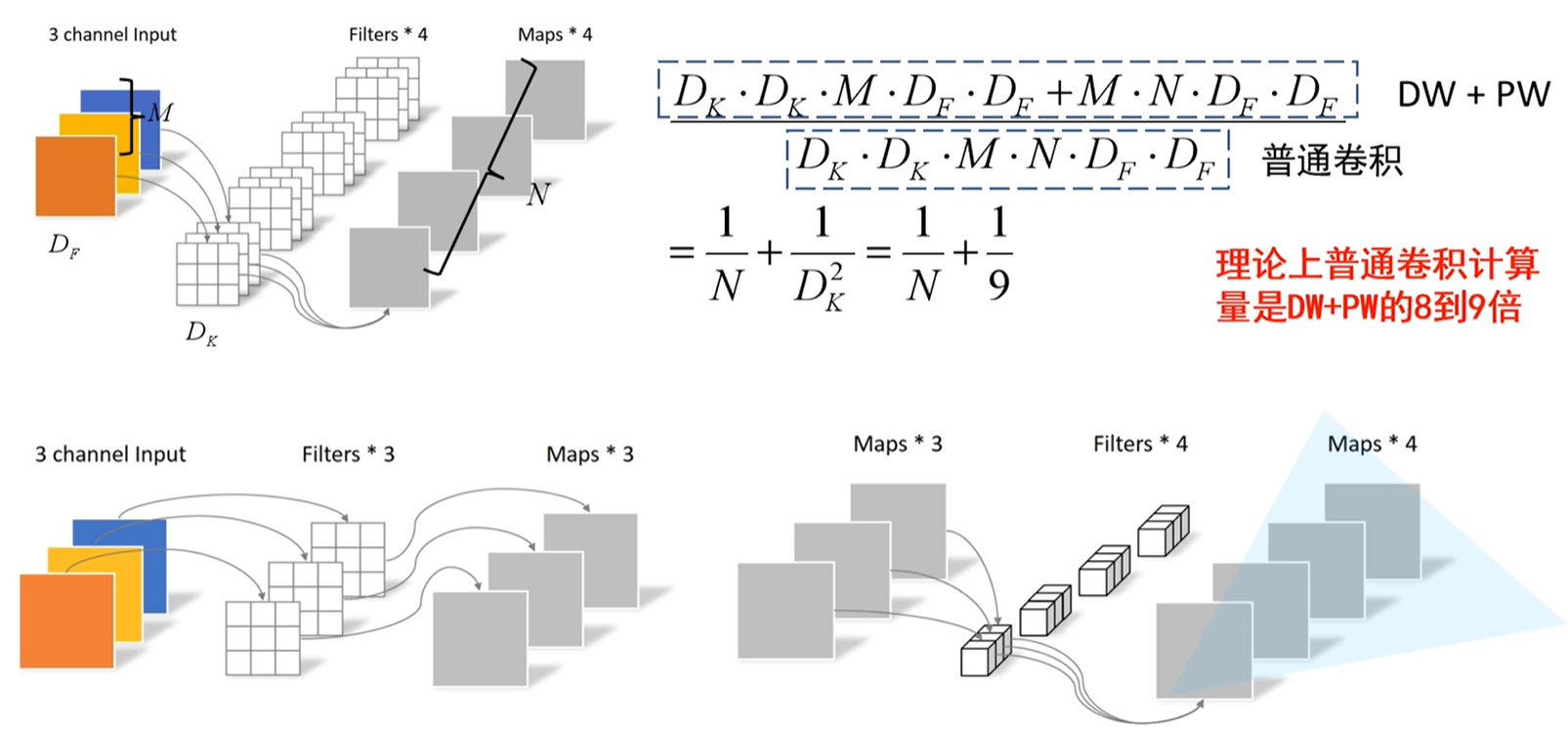
理论上,普通卷积计算量是DW&PW卷积的8~9倍
MobileNet v1网络结构参数
Filter Shape:3 x 3 x 3 x 32分别指的是卷积核的高宽、深度、个数
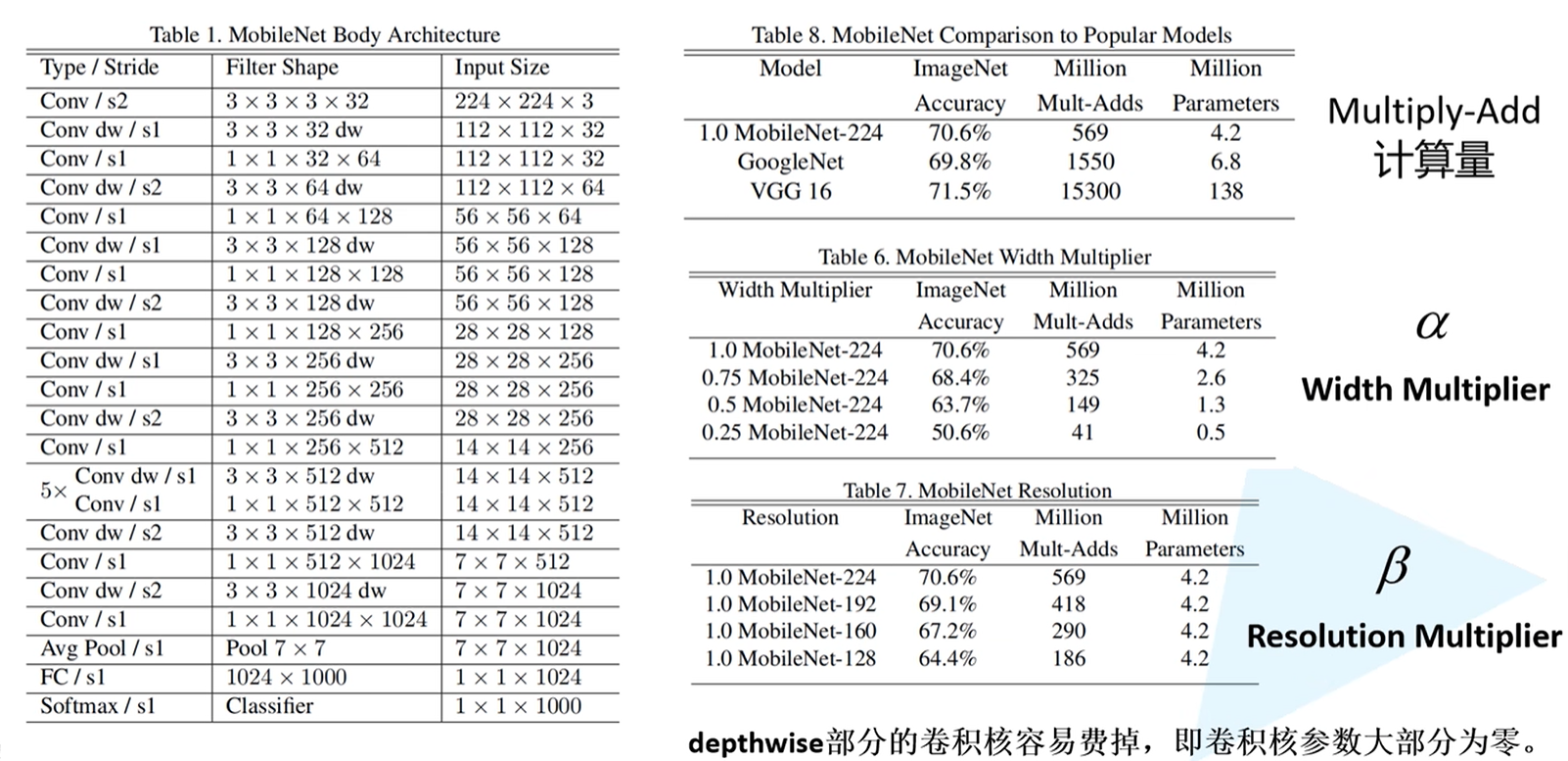
超参数$\alpha$、$\beta$
- $\alpha$:卷积核个数的倍率,用来控制卷积过程中所采用卷积核的个数
- $\beta$:分辨率的参数,用来控制输入图像的大小
大多数人发现,DW卷积在训练完之后的部分卷积核容易废掉,即卷积核参数大部分为0,也就是说DW卷积核没有起到作用。针对这个问题,在MobileNet v2版本中有一定的改善。
MobileNet v2
MobileNet v2网络是由google团队在2018年提出的,相比MobileNet v1网络,准确率更高,模型更小。原论文:MobileNetV2: Inverted Residuals and Linear Bottlenecks
网络中的亮点:
- Inverted Residuals(倒残差结构)
- Linear Bottlenecks
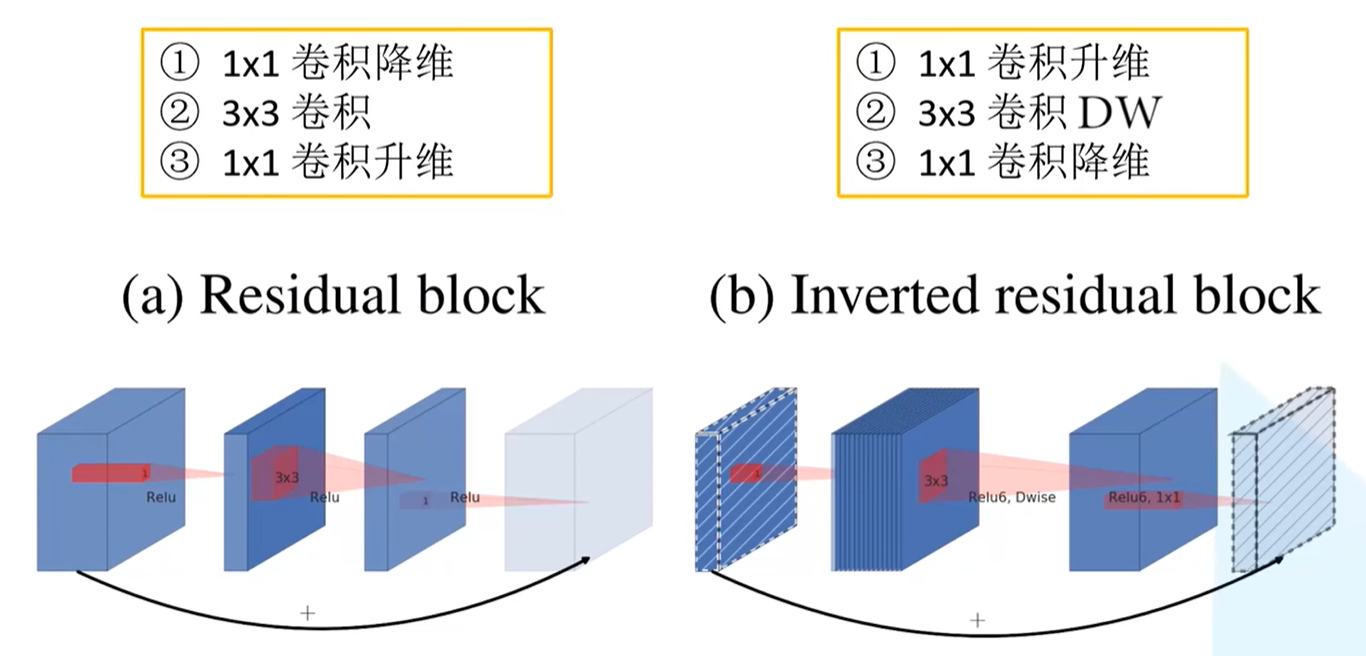
Inverted Residuals
Residual block
对输入特征矩阵采用1x1卷积核进行降维处理,之后经过3x3的卷积核及逆行卷积处理,再通过1x1的卷积核进行升维,之后再输出特征矩阵。这就形成两边大中间小的瓶颈结构。
注意:采用ReLU激活函数
Inverted residual block
对输入特征矩阵采用1x1卷积核进行升维处理,之后经过3x3的卷积核进行DW卷积,再通过1x1的卷积核进行降维处理,之后在输出特征矩阵。这就形成两边小中间大的橄榄球结构。
注意:采用ReLU6激活函数
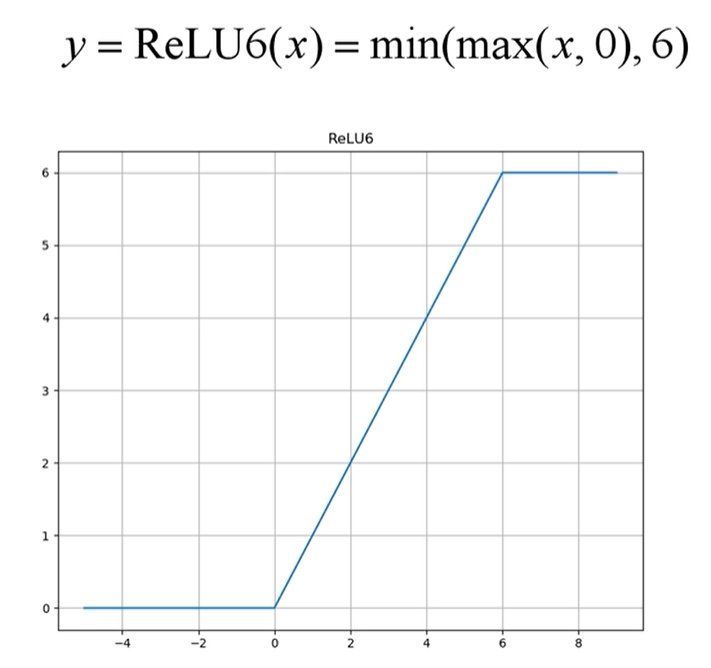
ReLU6激活函数
在普通的ReLU激活函数中,当输入值<0时,默认将输出置0;当输入值>0时,即不进行处理。在ReLU6激活函数中,在输入值<0,以及 [ 0, 6 ] 的区间时处理都一致,但在输入值>6时,将会将输出值一直为6。
Linear Bottlenecks
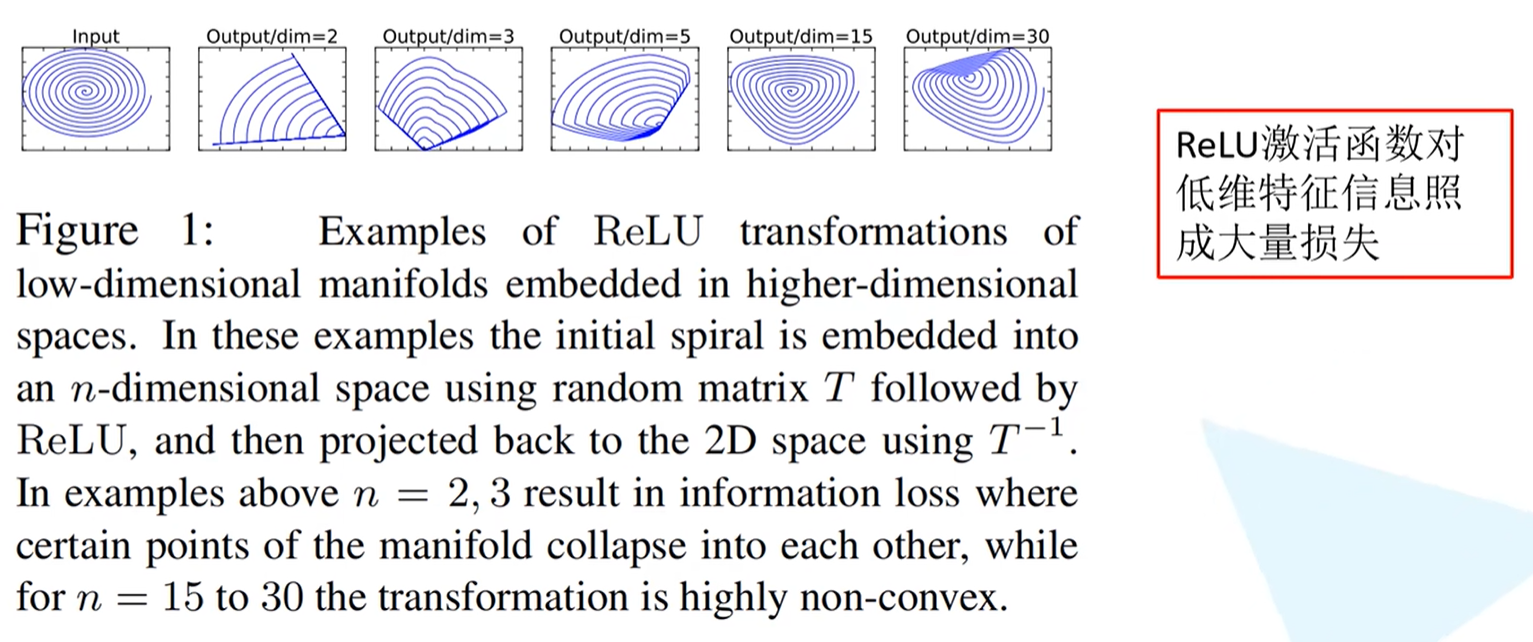
在论文中是针对Inverted residual结构的最后一个1x1的卷积层,使用线性激活函数而不是之前的ReLU激活函数。在下图中是作者在原文中描述为什么在最后一个1x1卷积层不使用ReLU激活函数原因的实验证明。
首先输入的是一个2维矩阵,channel = 1;之后采用不同维度的matrix T 将输入进行变化,变化到更高的维度,再通过ReLU激活函数得到输出值。之后再使用T矩阵的逆矩阵$T^{-1}$,将输出的矩阵还原回2维的矩阵。当matrix T的维度是2,3的时候(即还原回去之后),所对应的即是图中的Output/dim = 2,Output/dim = 3
由图中可以看到,当被还原之后,图像中已经丢失了很多信息,随着matrix T维度不断的加深,丢失的信息就越来越少。因此ReLU激活函数对低维特征信息造成大量损失,而对于高维特征信息造成的损失很小
而在Inverted residual结构当中,是两边细、中间粗的结构,因此在输出时是一个低维的特征向量,需要一个线性的激活函数来替代ReLU激活函数,来避免特征信息的损失。
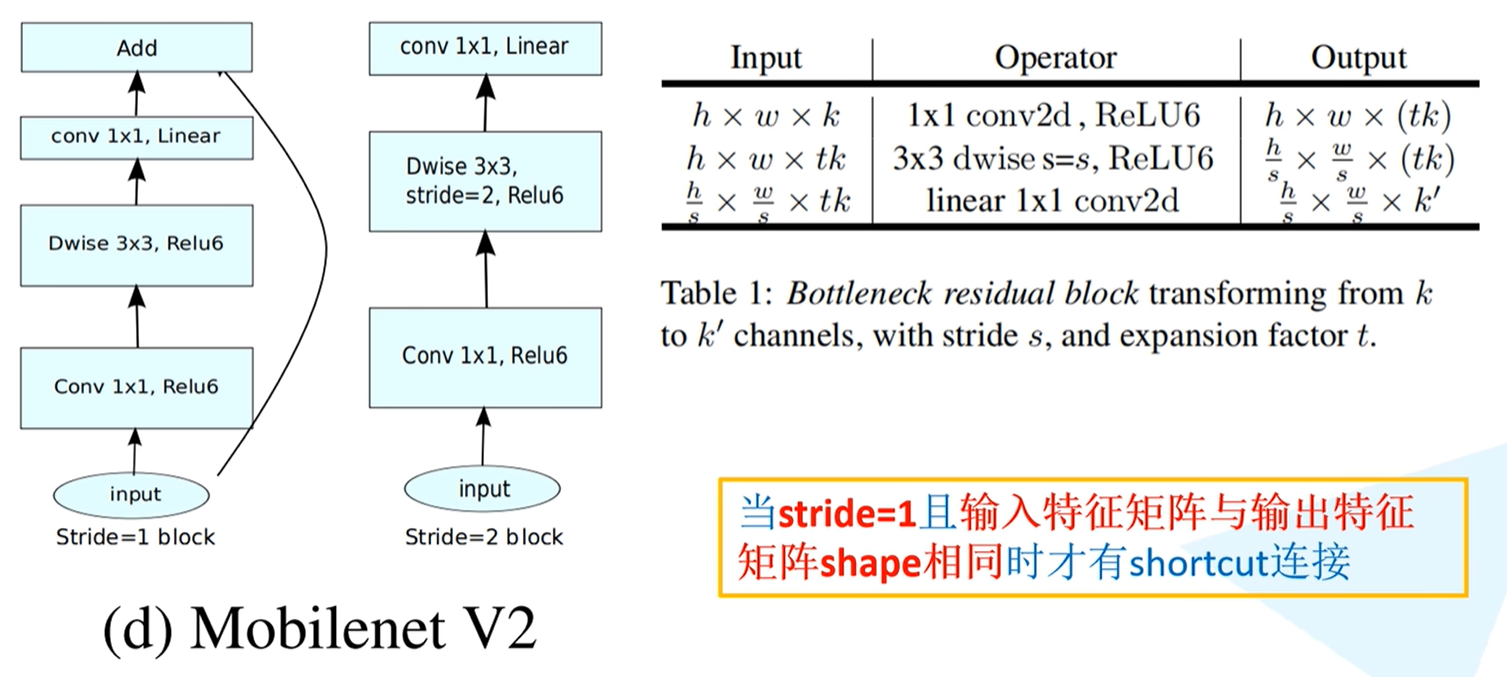
Inverted residual网络结构图
Inverted residual网络结构如下图(左),首先通过1x1的卷积层进行卷积,通过ReLU6激活函数进行激活,之后通过DW卷积,卷积核大小为3x3,同样通过ReLU6激活函数激活,最后经过卷积核大小为1x1的卷积处理,使用线性激活函数。
过程信息为下图(右)表格,首先通过1x1卷积层进行升维处理(输出深度为tk,也就是说这里采用的卷积核的个数是tk个);在第二层中,输入特征矩阵的深度为上一层的输出,即tk,这里采用卷积核大小为3x3的DW卷积,stride = s,由前文可知此处深度不变,依旧是tk,但高宽缩减s倍;最后一层通过1x1卷积核进行降维处理,卷积核个数为k‘。
注意:**在MobileNet v2版本中,并不是每一个Inverted residual结构中都有shortcut。**在论文中,表述当stride = 1时,是有shortcut,当stride = 2时,是没有shortcut。但通过搭建网络结构之后,会发现论文此处表述有误,正确表述应该为:当stride = 1且输入特征矩阵与输出特征矩阵shape相同时才有shortcut连接。
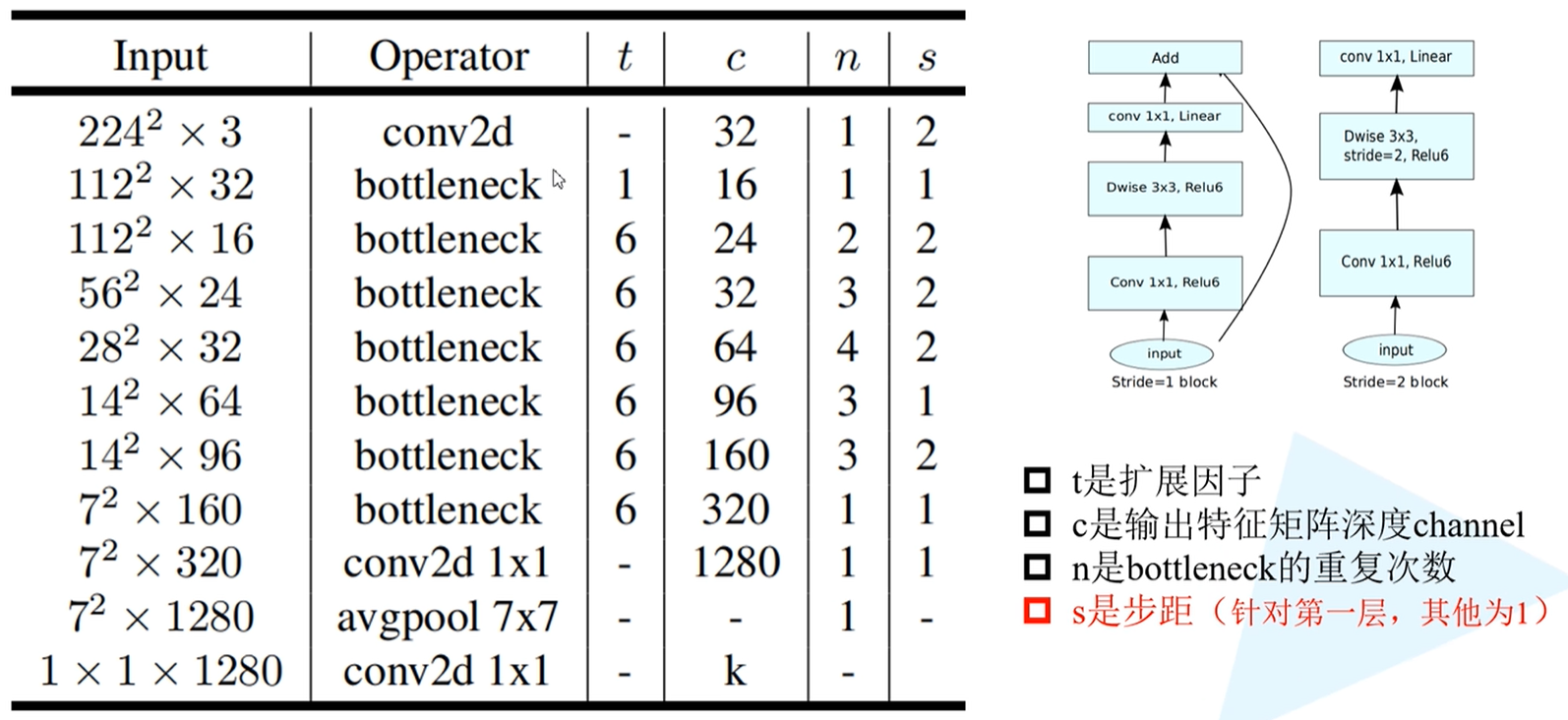
MobileNet v2网络结构参数
相关参数介绍:
- t:扩展因子,对应着第一层1x1的卷积层所采用的卷积核个数的拓展倍率
- c:时输出特征矩阵的深度channel,即是上图中提到的k’,控制着输出特征矩阵的深度
- n:bottleneck的重复次数,此处的bottleneck指的是论文中的Inverted residual结构
- s:步距,仅仅针对每一个block所对应的第一层bottleneck的步距(一个block由一系列bottleneck组成),其他都为1。假设当n = 2时,即bottleneck需要重复2遍,对于这个结构而言,第一层的步距是2,第二层s为1。
注意:在第一个bottleneck中,t = 1,即该处的扩展因子为1,也就是说在第一层卷积层是没有对特征矩阵的深度做调整的。因此在搭建网络时,因为这一层卷积层没有起到升维或者降维作用,所以会被跳过,直接进入3x3的卷积层中处理。
如何理解有无shortcut?
以输入为$14^2$x64这一行的block来举例,这一行的block采用了3个bottleneck结构,stride = 1,即此处block的第一层卷积层的stride = 1,如果按照官方标注而言,应该需要由shortcut。
但实际上这里不可能有shortcut,因此此处的输入特征矩阵的深度为64,但是输出特征矩阵的深度是96。也就是说,如果有shortcut的话,那么输出特征矩阵的深度应该是64,但从表中可知经过一系列操作后输出的特征矩阵深度是96,所以两个特征矩阵的深度是不相同的,无法相加。
在第二层的时候,s = 1,这里的输入特征矩阵深度是上一层的输出特征矩阵深度,即96,对于第二层bottleneck而言,输入的特征矩阵深度十96,其输出特征矩阵的深度也是96,有因为stride = 1,特征矩阵的高宽不会发生变化,因此满足输入特征矩阵和输出特征矩阵的shape保持一致的条件,此时才能使用shortcut。
因此,只有当stride = 1且输入特征矩阵与输出特征矩阵shape相同时才有shortcut连接。
conv2d 1x1
网络结构最后一层是卷积层,输入特征矩阵为1x1x1280,实际上这一层就是一个全连接层,功能上二者一模一样。k表示的是分类的类别个数,若针对ImageNet而言,这里的k = 1000。
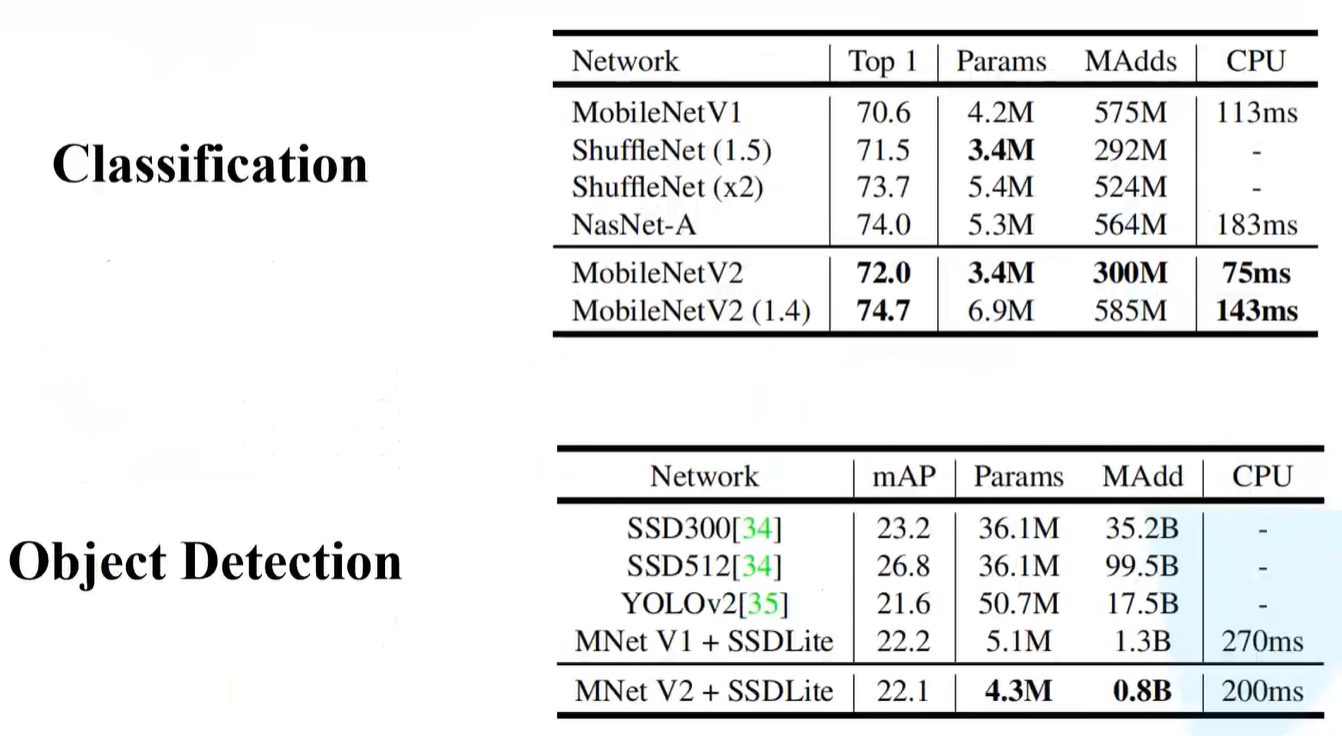
性能对比
表头对应为:准确率、模型参数、运算量、运算时间。
- 下图(上)是针对在分类任务中的性能对比,MobileNetV2(1.4)指的是$\alpha$ = 1.4(倍率因子);
- 下图(下)是针对在目标检测中的效果对比,将MNet V2与SSDLite联合使用,将MNet v2作为前置网络,SSDLite将其中的一些卷积层换为深度可分卷积,也就是DW卷积+PW卷积。
MobileNet v3
论文中的亮点:
- 更新Block(bneck)(即对Inverted residual结构基础上,进行简单改动)
- 使用NAS搜索参数(Neural Architecture Search)
- 重新设计耗时层结构(NAS搜索之后得到的网络,之后对网络的每一层的推理时间进行分析,针对某些耗时的层结构做进一步的优化)
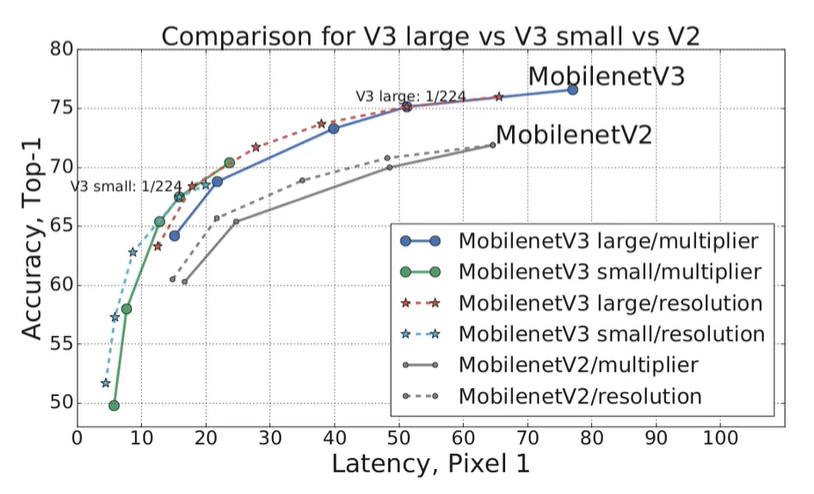
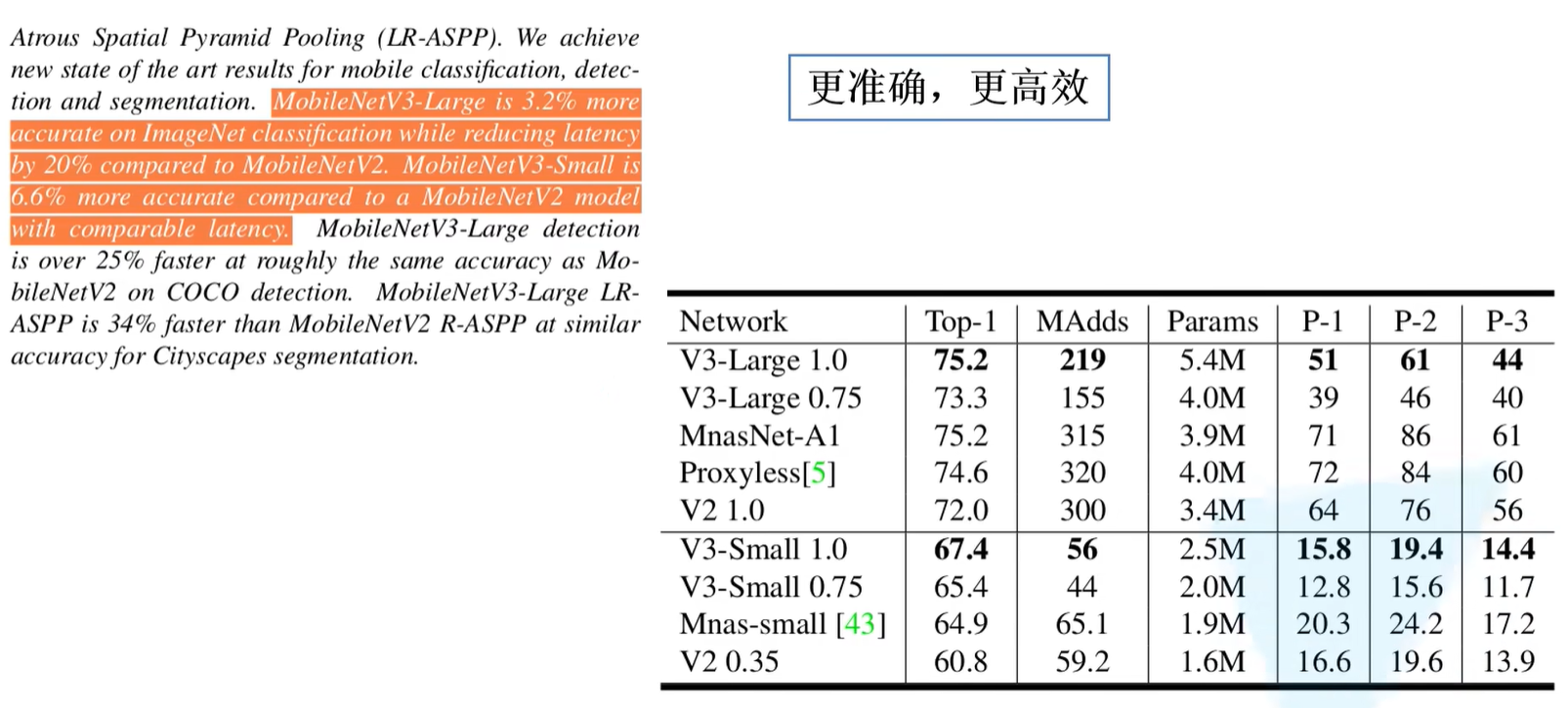
性能对比
在原论文的摘要中,作者提到,v3版本的Large对比v2而言在图像分类任务当中准确率上升有3.2%,延迟有降低20%。
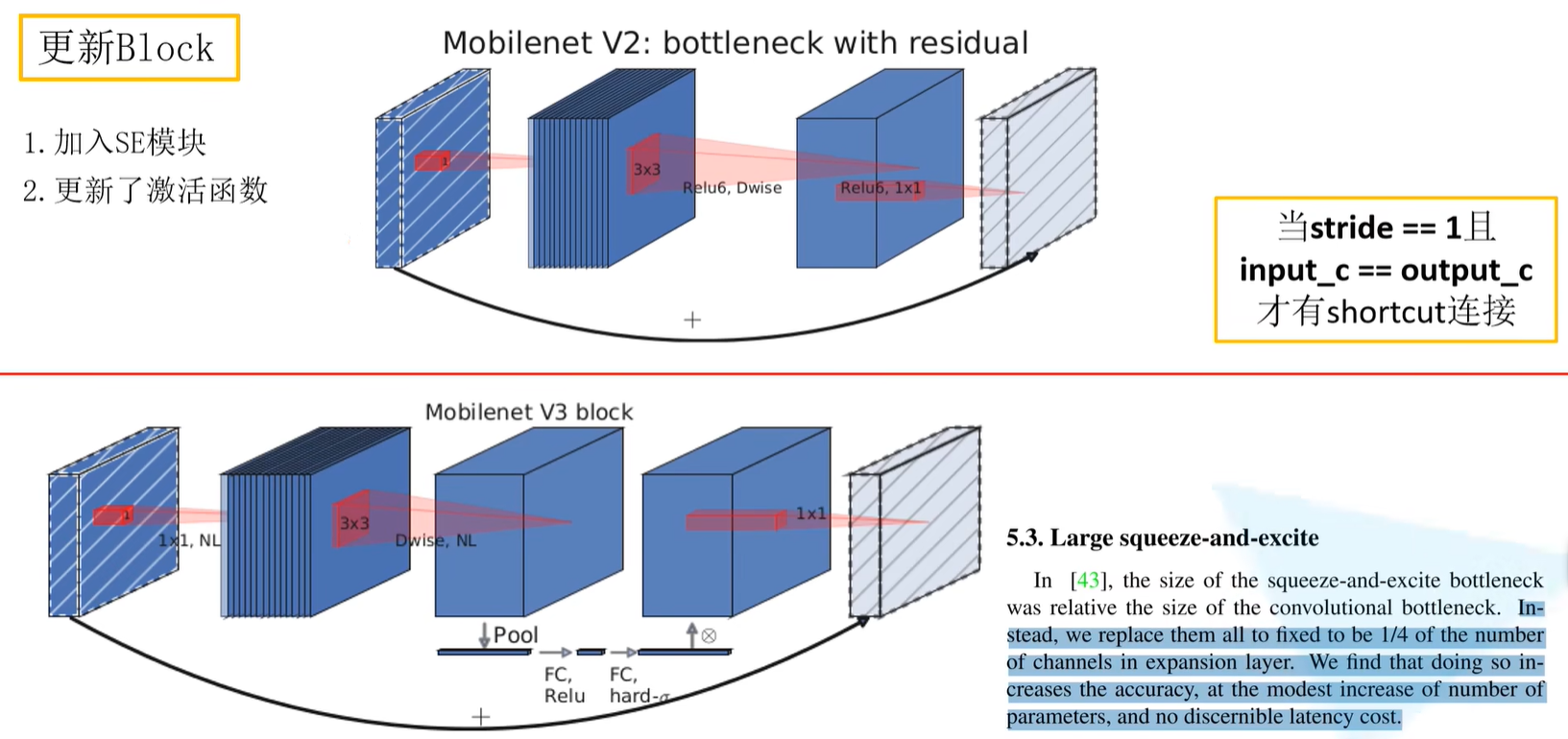
更新Block
在v3当中,做出了Block的更新:
- 加入SE模块,即通道的注意力机制模块
- 更新了激活函数
Mobilenet V2:bottleneck with residual
在v2当中,会首先通过1x1的卷积核对输入特征矩阵进行升维处理,之后通过BN,ReLU6激活函数,之后是通过3x3的DW卷积,之后进行BN,ReLU激活函数激活,最后通过1x1卷积层进行降维处理,之后只跟了一个BN结构,并没有像前面几层一样还有一个ReLU6激活函数。最后有一个shortcut相加处理。
注意:当stride = 1且input_c = output_c才有shortcut连接
Mobilenet V3 block
加入SE模块
大部分框架与v2保持一致,但是在第二层卷积层中加入了SE注意力机制。也就是说针对得到的特征矩阵,对每个channel进行池化处理,那么特征矩阵的channel是多少,得到的1维向量就有多少元素,之后再通过两个全连接层得到输出向量。
注意:
- 对于第一个全连接层,此处的节点个数 = 该处卷积层特征矩阵channel的1/4(在v3原论文中作者有给出)
- 第二层全连接层的节点个数 = 该处卷积层特征矩阵channel
- 对于输出的向量,可以理解为是对该层卷积层特征矩阵的每一个channel分析出了一个权重关系,觉得比较重要的channel会赋予更大的权重,觉得不是那么重要的channel的维度上就对应较小的权重。
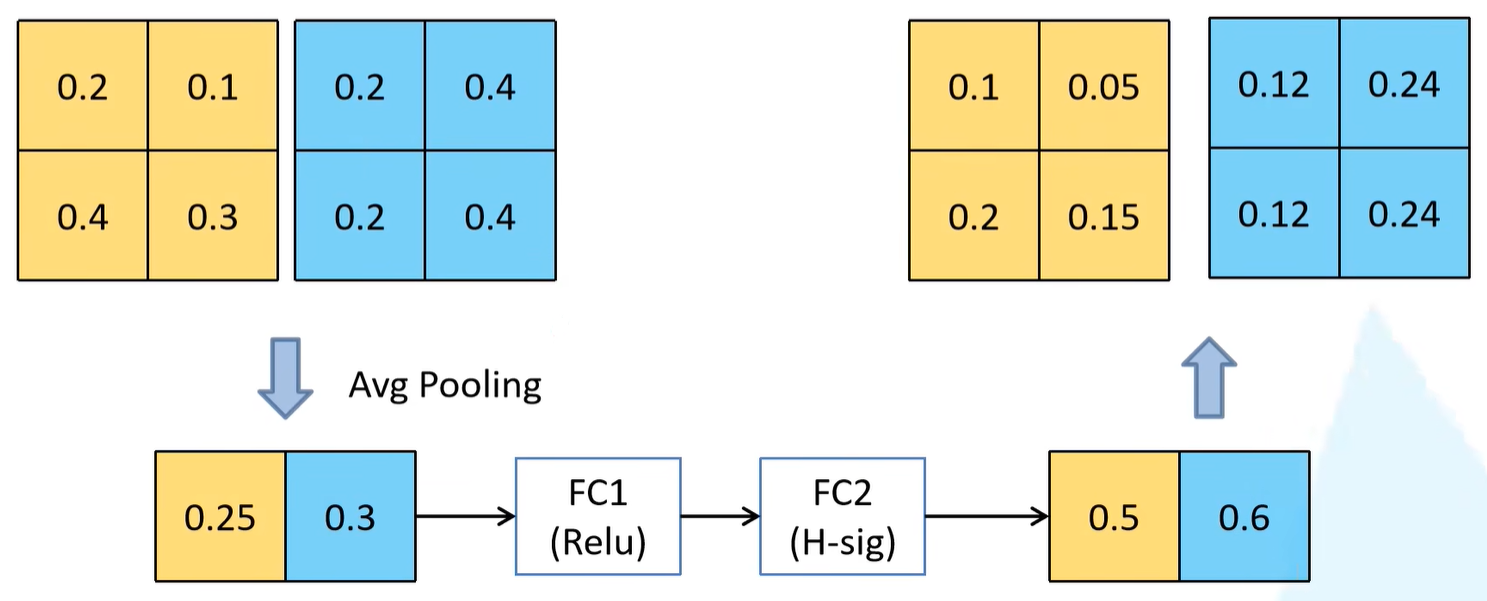
理解两处的全连接层
假设此处特征矩阵的channel = 2,首先通过平均池化下采样层操作对每一个channel取一个均值,由于有两个channel,所以得到一个元素个数为2的向量。之后再依次通过两个全连接层,得到输出。
针对FC1,节点个数= 输入特征矩阵channel的1/4,实际情况中channel会很多,不会出现小于4的情况。之后跟着一个ReLU激活函数。对于FC2而言,节点个数 = 输入特征矩阵channel = 2,之后跟着H-sig激活函数(之后讲解)。
之后会得到有2个元素的向量,每一个元素对应的就是每一个channel所对应的权重。比如预测第一个channel的权重 = 0.5,那么就将0.5与第一个channel的当中的所有元素相乘得到一个新的channel数据。
更新激活函数
在v3的Block中所使用的激活函数标注的都是NL激活函数,即非线性激活函数的意思。因为在不同的层之间所使用的激活函数都不一样,因此在下图中并未给出明确的激活函数名称。
注意:在最后一个标注的1x1降维的卷积层中,是没有使用激活函数的,也可以说使用了一个线性激活函数y = x。
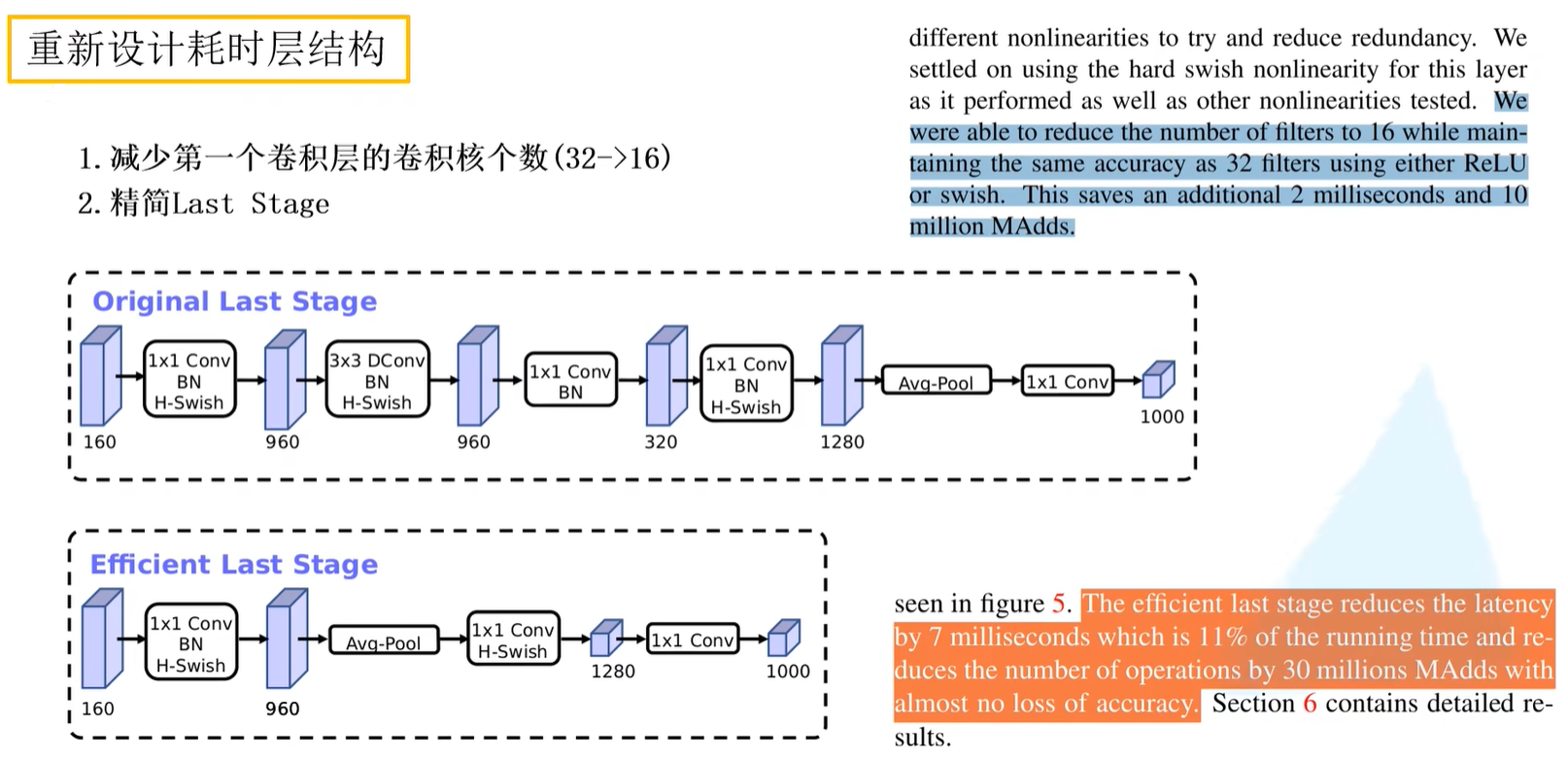
重新设计耗时层结构
-
减少第一个卷积层的卷积核个数(32->16)
在原论文当中,作者提到当卷积核个数变化了之后,准确率是没有变化的,那么就达成了在维持准确率不降的前提下减少计算量的目的,这里大概减少2ms的时间
-
精简Last Stage
在通过NAS搜索出来的网络结构的最后一个部分叫做Original Last Stage,作者在原论文中发现,这一个流程是比较耗时的,因此作者针对这个结构做出精简化,于是提出了Efficient Last Stage。
在精简之后发现,第一个卷积层是没有发生变化的,紧接着直接进行平均池化操作,然后跟着两个卷积核输出。和下图(上)的结构对比而言,减少了许多层结构。调整之后,作者发现准确率无多少变化,但执行时间上减少了7ms,这7ms占据整个推理时间的11%。
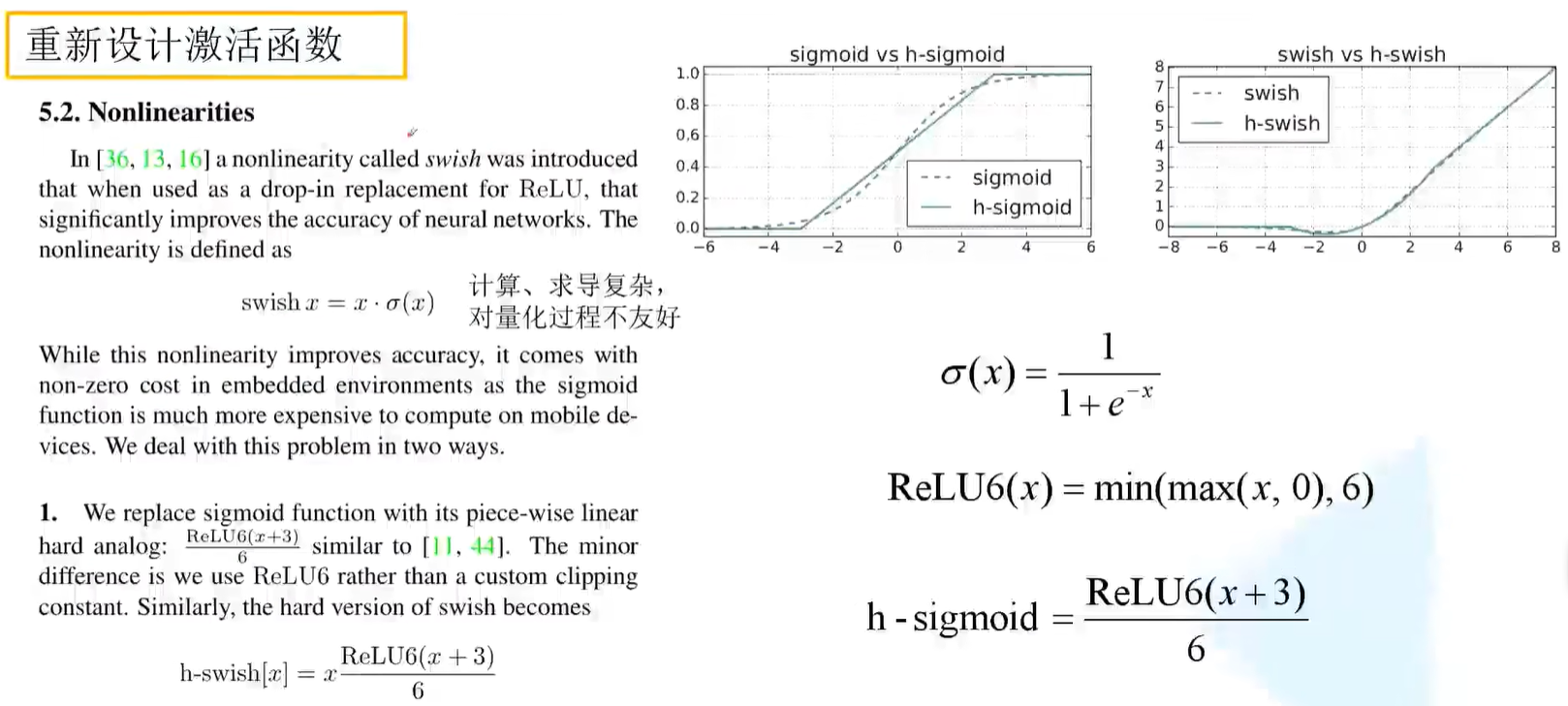
重新设计激活函数
在v2网络结构中,基本使用的激活函数都是ReLU6,目前来说比较常用的激活函数叫做swish激活函数,也就是输入值*sigmoid函数。使用swish激活函数确实会提高网络的准确率,但是在计算、求导上非常复杂,对量化过程也不友好(将模型部署到硬件设备上)。
于是作者提出h-swish激活函数,也就是输入值*h-sigmoid函数,其中h-sigmoid = ReLU6(x+3)/6,也就是在ReLU函数的输入值基础上+3的值除以6。
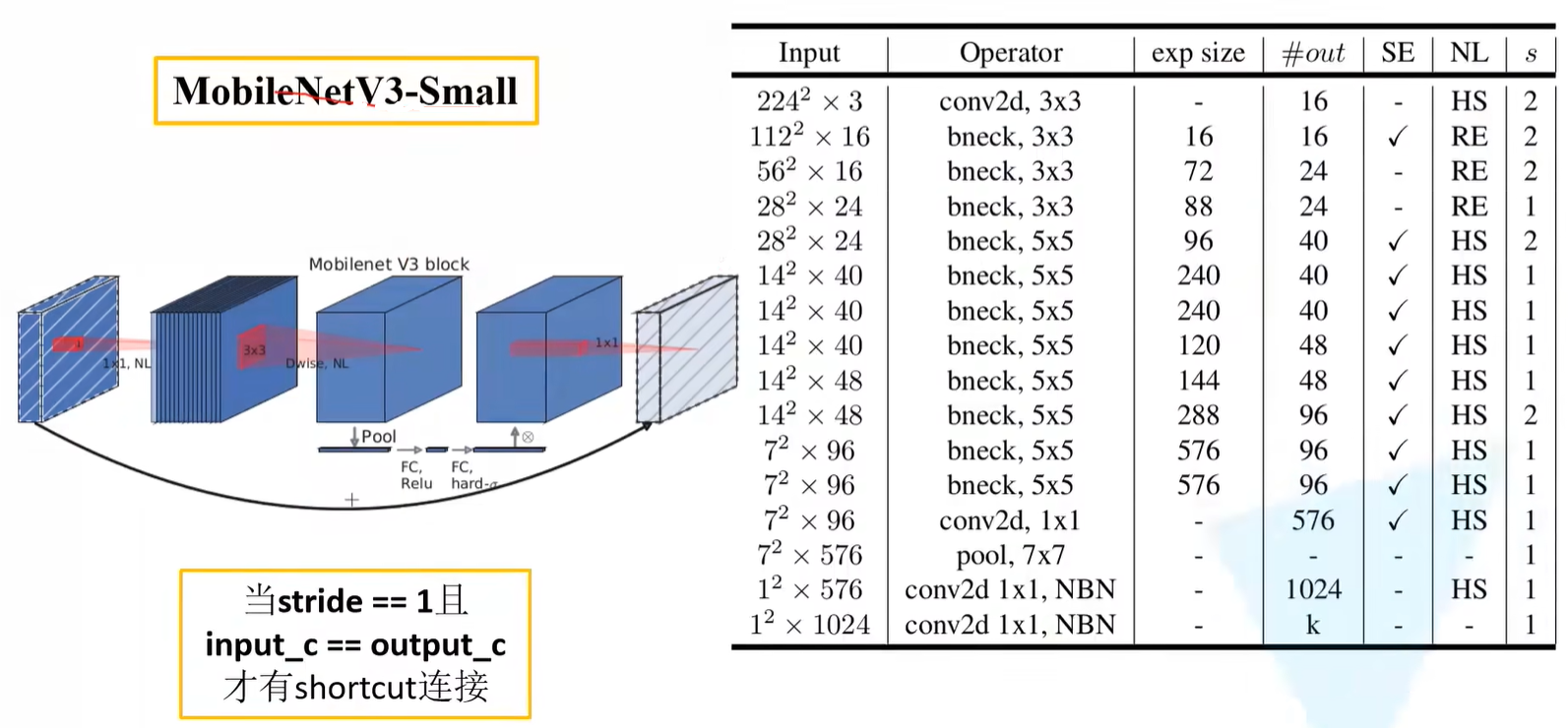
V3-Large网络结构参数
input:输入特征矩阵的长宽深;Operator:对应操作,例如第一层进行conv2d操作;bneck指进行的block操作,其中3x3指的是下图(左)中的DW卷积中卷积核的大小exp size:代表第一个升维的1x1卷积需要将维度升到多少#out:输出特征矩阵的channel;SE:是否使用注意力机制NL:使用的激活函数,HS指H-swish激活函数,RE指ReLU6激活函数s:表示DW卷积中的步距stride
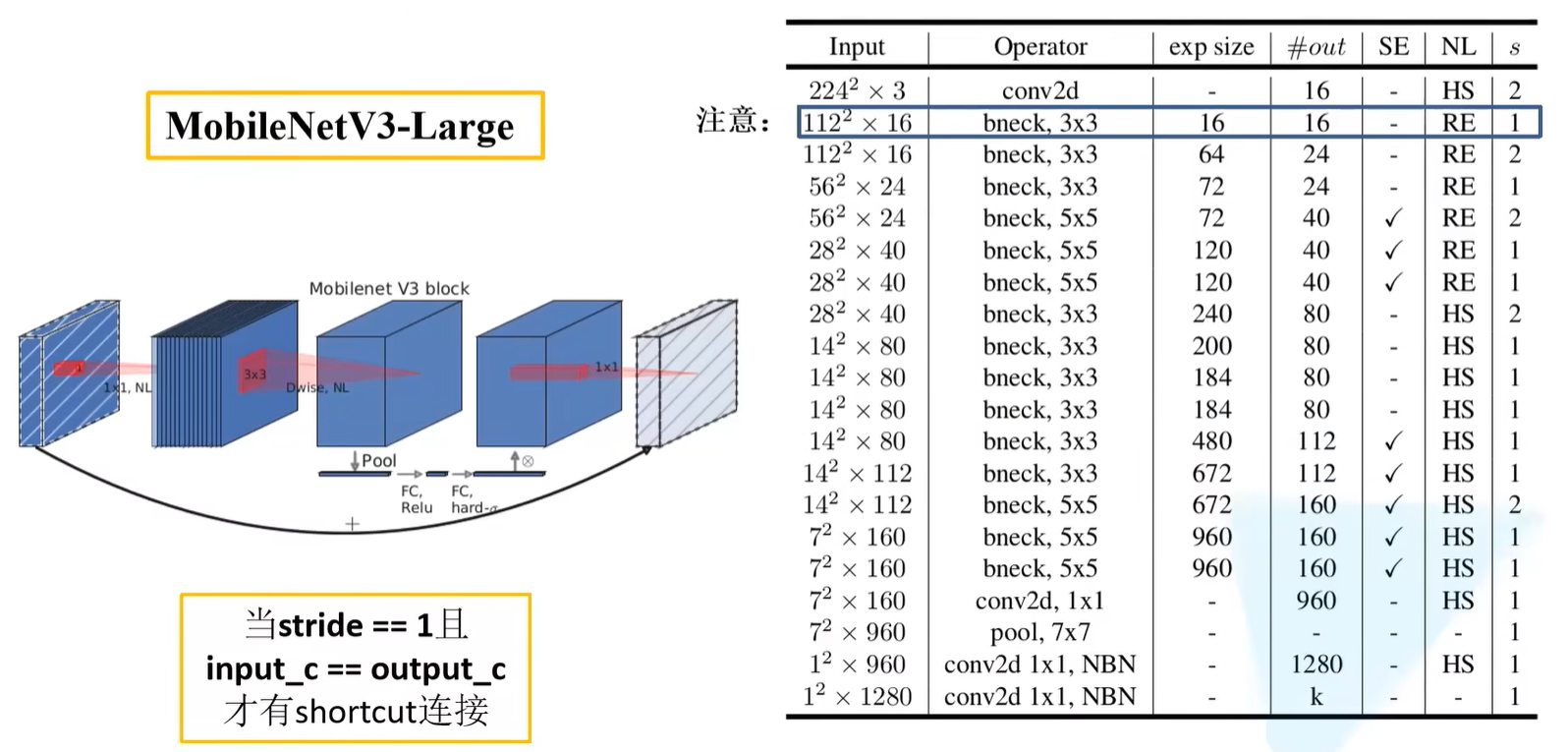
最后两层有写到NBN结构,指的是不去使用,和全连接层的作用是差不多的,这里直接使用卷积结构。
注意:在第一个bneck结构的第一层卷积层之中,因为i输入的特征矩阵channel = 16且输出的特征矩阵channel = 16,因此没有进行升维和降维,且没有SE结构,直接进行1x1的卷积层输出就没有了,因此在搭建网络中,会省略这一步。
V3-Small网络结构参数